Varoitus: Luvassa on kuivakkaa (mutta ihan hyödyllistä) teoriatietoa!
Valokuvaajille värien ymmärtäminen on keskeinen asia, mutta silti väreistä on liikkeellä paljon väärinymmärryksiä. Erityisesti tähtivalokuvauksen kannalta asia on tärkeä ymmärtää hyvin, sillä kuvien käsittely hoidetaan alusta asti itse, eikä sitä voi ulkoistaa kameralle tai Adobe Lightroomille. Värit ovat monille niin itsestäänselvä asia, että niitä ei tule mietittyä sen tarkemmin. Mitä väri tarkkaanottaen on? Onko väri aineen ominaisuus? Tai valon ominaisuus? Ei varsinaisesti kumpaakaan!
Väri on valon aiheuttama aistimus ihmisen näköjärjestelmässä. Valo puolestaan on sähkömagneettista säteilyä, aivan kuten radioaallot, mikroaallot, röntgensäteet ynnä muut. Nämä eri säteilytyypit erottaa toisistaan ainoastaan säteilyn aallonpituus. Valo käyttäytyy kummallisesti yhtä aikaa niin hiukkasina kuin sähkömagneettisina aaltoina. Näiden aalton aallonpituus määrää miten silmä reagoi niihin, vai reagoiko laisinkaan. Tässä tapauksessa helpointa lienee ajatella valo pieninä hiukkasina, eli fotoneina, joihin jokaiseen on kiinnitetty numero, sille ominainen aallonpituus.
Ihmissilmä reagoi fotoneihin, joiden aallonpituus on karkeasti 400 ja 700 nanometrin välillä. Pitkät aallonpituudet havaitaan punertavina ja lyhyet sinertävinä. Näiden välissä olevat aallonpituudet havaitaan vihertävinä. Arkielämässä kohdataan kuitenkin harvoin valonlähteitä, jotka säteilevät vain yhdellä aallonpituudella (tällaista valoa kutsutaan monokromaattiseksi). Sen sijaan yleisimmät valonlähteet säteilevät valoa monilla valon aallonpituuksilla. Kun fotoneja on suuri joukko, voidaan tarkastella fotonijoukon aallonpituuksien jakaumaa. Tätä jakaumaa kutsutaan valon spektriksi. Spektri kuvaa käytännössä miten kirkas valo on kullakin aallonpituudella.
Miten väriaistimus muodostuu?
Ihmissilmässä on tappisoluiksi kutsuttuja soluja, joiden avulla ihminen aistii valoa ja sen värejä. Tappisoluja on kolmenlaisia, ja erilaiset tappisolut ovat herkkiä valon eri aallonpituuksille. Tappisolujen ansiosta ihmisen näköjärjestelmä kykenee erottelemaan eri spektrejä toisistaan, eli eri spektrit tuottavat eri väriaistimuksen. Tappisolut eivät kuitenkaan toimi hämärässä valaistuksessa. Tällöin apuun tulevat sauvasolut, joita on vain yhdenlaisia. Koska sauvasoluja on vain yhdenlaisia, ne eivät kykene erottelemaan erilaisia spektrejä toisistaan, vaan ne havaitsevat eri spektrit vain kirkkauseroina. Tämän takia ihminen ei kykene havaitsemaan värejä hämärässä.
Eri tappisolutyypit on nimetty S-, M- ja L-tappisoluiksi. Kirjaimet viittaavat sanoihin Short (lyhyt), Medium (keskipitkä) ja Long (pitkä), joilla tarkoitetaan aallonpituuksia, joille tappisolut ovat kaikkein herkimpiä. S-tappisolut ovat herkkiä lyhyille aallonpituuksille (siniselle valolle), M-tappisolut keskipitkille aallonpituuksille (vihreälle valolle) ja L-tappisolut pitkille aallonpituuksille (punaiselle valolle). Oheisesta kuvasta voi nähdä eri tappisolutyyppien suhteelliset herkkyydet valon eri aallonpituuksille.

Tappisolujen herkkyyskäyrät. © User:Vanessaezekowitz / Wikimedia Commons / CC-BY-3.0
Kunkin tappisolutyypin vaste tiettyyn spektriin voidaan laskea suoraan painottamalla spektri tappisolun herkkyydellä ja laskemalla käyrän alle jäävä pinta-ala (ts. integroimalla). Kaikki spektrit, jotka tuottavat keskenään samat tappisoluvasteet, näyttävät ihmissilmällä samalta. Näin mikä tahansa väriaistimus voidaan ilmoittaa yksinkertaisesti kolmella numerolla. Asiaa mutkistaa hieman se, että ihmisen näköjärjestelmä mukautuu ympäröivään valaistukseen, mikä muuttaa väriaistimuksia, mutta siihen emme perehdy tässä sen syvemmin.
Tätä tappisolujen vasteiden määrittämää esitystapaa kutsutaan LMS-väriavaruudeksi. Erinäisistä syistä LMS-väriavaruutta ei juurikaan käytetä, vaan värejä pyöritellään sellaisissa väriavaruuksissa kuten sRGB, CIEXYZ ja CIELAB. Kaikki väriavaruudet nojaavat kuitenkin pohjimmiltaan siihen, että kolme numeroa ja tieto käytetystä väriavaruudesta määrittävät yksikäsitteisesti väriaistimuksen.
Kameran tallentamat värit
Normaali värikamera toimii hyvin samalla periaatteella kuin silmän tappisolut. Kameran sensori koostuu yksittäisistä valoherkistä pikseleistä, joista jokaisen päällä on punainen, vihreä tai sininen värisuodatin, kuten oheisessa kuvassa. Koska jokaisen pikselin päällä on vain yksi värisuodatin, täytyy puuttuvien suodattimien informaatio laskea naapuripikselien perusteella. Näin saadaan aikaiseksi kuva, jonka jokaisessa pikselissä on kolme numeroa kuvaamassa pikseliin osuneen valon väriä.
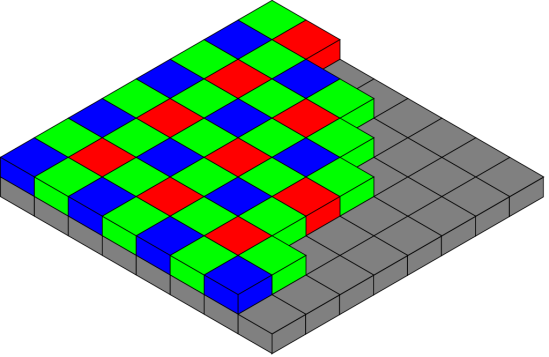
Värikameran kennolla olevat värisuodattimet. © User:Cburnett / Wikimedia Commons / CC-BY-SA 3.0
Tähtivalokuvaajat käyttävät usein värikameroiden sijasta harmaasävykameroita, jotka kykenevät tallentamaan vain kirkkauseroja. Tällaisilla kameroilla voidaan kuitenkin tehdä värikuvia vaihtamalla kameran eteen vuorotellen erilaisia värisuodattimia. Näin lopputulema on sama kuin värikameran kanssa, eli jokaista pikseliä kohden tallessa on kolme numeroa. Usein näistä numeroista puhutaan pikselien RGB-arvoina.
Tässä kohtaa tähtikuvaajat ovat yleensä tyytyväisiä, ja kuvia lähdetään valkotasapainottamaan, venyttämään ja käsittelemään eteenpäin. Tämä ei tarkkaanottaen ole kuitenkaan ihan oikein. Kameran raakakuvasta luetut RGB-arvot eivät vielä suoraan kerro minkälaisen värihavainnon ihmisen näköjärjestelmä olisi saanut samasta näkymästä. Tietyn spektrin tuottamat RGB-arvot riippuvat täysin kameran sensorin herkkyydestä valon eri aallonpituuksille ja käytettyjen värisuodattimien päästökaistoista. Oheiseen kuvaajaan on piirretty järjestelmäkameran punaisten, vihreiden ja sinisten pikselien tyypilliset herkkyydet.
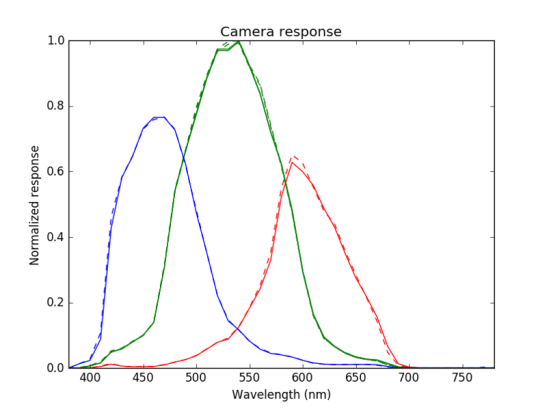
Canon EOS 60D -järjestelmäkameran herkkyyskäyrät.
Kameran tuottamia RGB-arvoja voidaan muuttaa mielivaltaisesti vaihtamalla sensoria tai värisuodattimia, vaikka pikseliin tullut spektri todellisuudessa tuottaisi ihmissilmässä aivan tietynlaisen väriaistimuksen. Alla olevaan kuvaajaan on piirretty käyttämäni Atik 460EX -kameran herkkyys Astrodonin värisuodattimien kanssa. Kuten kuvasta näkyy, suodattimien päästökäyrät ovat vallan erilaiset kuin esimerkiksi järjestelmäkameralla, eli samanlainen valon spektri tuottaa aivan erilaiset RGB-arvot järjestelmäkameralla kuin tähtikuvauskameralla.
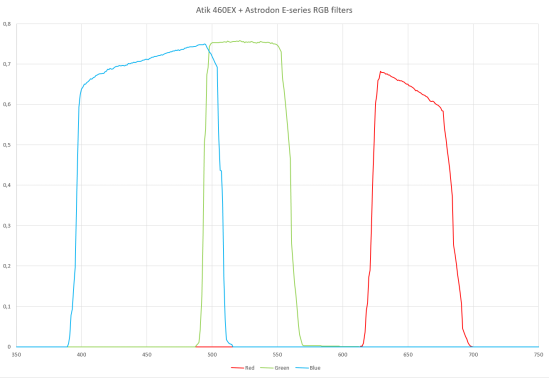
Atik 460EX -tähtikuvauskameran herkkyys valon eri aallonpituuksille Astrodonin värisuodattimien kanssa.
Ongelmaa voi havainnollistaa miettimällä mitä tapahtuu, jos esimerkin kameralla ja suodattimilla kuvaisi planetaarista sumua, jossa ionisoitunut happi säteilee monokromaattista valoa 500 nanometrin aallonpituudella (tämä on siis sama asia kuin tähtikuvaajille tuttu OIII-emissio). Ihmissilmällä 500 nanometrin säteily näkyy sinertävän vihreänä.
Astrodonin vihreän ja sinisen suodattimen päästökaistat menevät päällekäin 500 nanometrin kohdalla, joten valo aiheuttaa suunnilleen yhtä voimakkaan vasteen molempien suodattimien kanssa, eikä lainkaan vastetta punaisen kanssa. Sumu näyttäisi siis jotakuinkin oikean väriseltä, jos RGB-kuvaa käytettäisiin sellaisenaan. Päästökaistat menevät tässä kohtaa päällekäin juuri tämän vuoksi. Astrodon on suunnitellut suodattimet tähtikuvaajia varten. Sen sijaan jos vihreän suodattimen päästökaistaa siirrettäisiin hieman pitkiä aallonpituuksia kohti, lakkaisi 500 nanometrin säteily aiheuttamasta kamerassa minkäänlaista vastetta vihreän suodattimen kanssa, ja sumu näyttäisi sellaisenaan käytetyssä RGB-kuvassa täysin siniseltä.
Miten korjata tilanne?
Jos tavoitteena on valokuva, jonka värit vastaavat ihmisen näköjärjestelmän tuottamia väriaistimuksia samasta näkymästä, täytyy luoda jonkinlainen linkki kameran RGB-arvojen ja todellisten värien välille. Voidaan ajatella, että kameran kuvasta mitatut RGB-arvot ovat laitteen omassa laiteriippuvaisessa väriavaruudessa, jonka suhde johonkin laiteriippumattomaan väriavaruuteen täytyy selvittää. Tavoitteena on siis luoda muunnos, joka muuntaa laiteriippuvaiset RGB-arvot johonkin tunnettuun väriavaruuteen. Normaalitilanteessa kameravalmistaja on vastuussa tästä, ja kamera tekee muunnoksen (ja kaiken muunkin käsittelyn) valmiiksi. Tähtivalokuvien tapauksessa kaikki käsittely täytyy tehdä itse.
Tällaisia värimuunnoksia on monenlaisia, ja niiden kehittäminen ei ole aivan suoraviivaista. Yleisin ja yksinkertaisin tapa on kuvata jotakin tunnettua värikarttaa tunnetussa valaistuksessa. Kun tiedetään minkä värisiä värikartan värinäytteet ovat todellisuudessa ja kuvasta mitataan niiden tuottamat RGB-arvot, voidaan tällainen muunnos luoda. Alla on kuva yleisesti käytössä olevasta värikartasta.
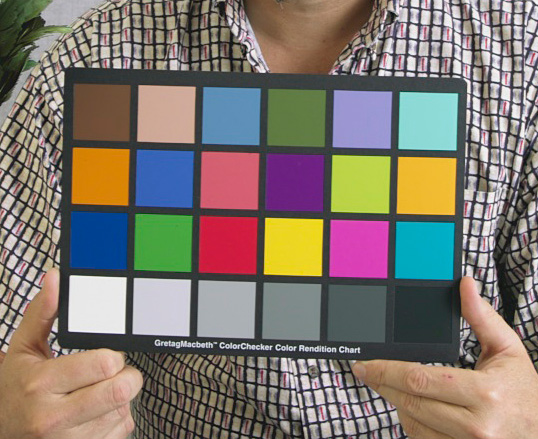
GretagMacbeth ColorChecker -värikartta.
Valaistuksen spektrin mittaaminen ja värikartan kuvaaminen kaukoputkella ovat kuitenkin vähintään haastavia toimenpiteitä, eikä maanpäällisille kohteille normaaleissa valaistusolosuhteissa optimoitu muunnos välttämättä toimi kovin hyvin tähtikuvissa, sillä avaruuden kohteiden säteilemät spektrit poikkeavat merkittävästi spektreistä, joita tavataan arkielämässä Maapallolla.
Sopiva muunnos voidaan tehdä myös laskennallisesti, jos suodattimien päästökaistat ja kameran herkkyys valon eri aallonpituuksille tunnetaan, sillä näillä esitiedoilla voidaan laskea millaisen RGB-arvon minkäkinlainen spektri tuottaa kamerassa. Asiaa mutkistaa se, että tähtivalokuvauksessa käytettyjen värisuodattimien päästökaistoissa tapahtuu yleensä jyrkkiä vaihteluita, ja eri suodattimien päästökaistat eivät mene juurikaan päällekkäin. Erinäisistä syistä tämä vaikeuttaa sopivan muunnoksen tekemistä. On helppo tehdä muunnos, joka korjaa muutaman värin hyvin lähelle oikeaa, mutta loput muuttuvat entistäkin huonommiksi. Aiemmin kuvatuille järjestelmäkameran päästökaistoille on huomattavasti helpompi tehdä toimiva värimuunnos.
Tähtikuvaamisen tapauksessa värien korjaaminen lähemmäs totuutta on sen verran haastavaa, että useimmissa tapauksissa on helpointa jättää korjaus tekemättä. Käytännössä kaikki avaruuden kohteet ovat niin himmeitä, että ihmissilmä ei kykene näkemään niissä värejä, joten ihmisellä ei ole mitään suoraa kokemusta siitä minkä väriseltä minkäkin kohteen pitäisi näyttää. Maanpäällisiä kohteita kuvatessa tilanne on aivan erilainen, sillä ihminen huomaa heti jos esimerkiksi Fiskarsin sakset tai Coca-Cola-tölkit ovat väärän värisiä, iho vihertävää tai puiden lehdet sinertäviä. Tällaisia hyvin tuttuja värejä kutsutaankin muistiväreiksi.
Muistivärien takia on tärkeää, että värit korjataan mahdollisimman lähelle todellista näköaistimusta. Avaruudessa muistivärejä ei juuri ole, joten tarkalla värientoistolla ei ole läheskään niin suurta merkitystä. Yleensä riittää, että kuvat ovat miellyttävän värisiä.
Näyttölaitteet ja värienhallinta
Kauniit tähtikuvat tietokoneen kovalevyllä eivät juuri lämmitä, jos niitä ei pääse näkemään. Kuvia yleensä katsellaankin erilaisilla näyttölaitteilla, ja näyttölaitteella on keskeinen merkitys sille miltä kuvat lopulta näyttävät.
Siinä missä kamera vastaanottaa valoa ja tallentaa havaitsemansa spektrin kolmeksi numeroksi, näyttölaite tekee päinvastoin. Näyttölaite vastaanottaa tietokoneelta kolme numeroa, ja tuottaa niiden perusteella valoa, jonka spektri toivottavasti tuottaa oikeanlaisen väriaistimuksen ihmisen näköjärjestelmässä.
Jotta näyttö näyttäisi halutut värit oikein, näytöille tehdään samankaltainen värimuunnosoperaatio kuin kameroille, paitsi käänteisesti. Näytölle annetaan käskyjä näyttää erilaisia värejä, ja tarkoitukseen valmistetulla mittarilla (esim. X-Rite i1 Display Pro) mitataan millaista valoa näytöstä todellisuudessa säteilee. Näin voidaan näytölle annettuja värejä korjata siten, että lopputulos on haluttu. Tätä mittausoperaatiota kutsutaan näyttölaitteen profiloinniksi.
Värienhallinnassa on siis pohjimmiltaan kyse vain siitä, että tutkitaan miten erilaiset laiteriippuvaiset väriavaruudet suhtautuvat laiteriippumattomiin väriavaruuksiin, jotta värit pystytään säilyttämään oikein siirryttäessä avaruudesta toiseen. Koko ketju kamerasta tietokoneen kautta näyttölaitteelle saattaa mennä karkeasti seuraavanlaisesti. Kameran kennolle lankeaa ulkomaailmasta valoa, jonka kamera muuttaa RGB-arvoiksi. Muunnos laitteen omista laiteriippuvaisista RGB-arvoista johonkin laiteriippumattomaan väriavaruuteen kuten CIEXYZ-avaruuteen saadaan laitevalmistajalta tai se voidaan määrittää itse. Kun muunnos on tiedossa, RGB-arvot voidaan muuntaa tähän väriavaruuteen. Kun näyttölaite on profiloitu, eli tunnetaan muunnos esimerkiksi CIEXYZ-avaruudesta näyttölaitteen omaan väriavaruuteen, voidaan kuvan muuntaa taas tähän laiteriippuvaiseen väriavaruuteen ja lähettää näytölle, joka puolestaan tuottaa valoa, joka toivon mukaan aiheuttaa samanlaisen väriaistimuksen kuin alkuperäinen näkymä, jonka kamera näki.
Yleensä kuvatiedostojen metatietoihin tallennetaankin tieto siitä, että missä väriavaruudessa kuvatiedostoon tallennetut numeroarvot on ilmoitettu. Tämä tieto väriavaruudesta erottaa mielivaltaiset kolmen numeron yhdistelmät varsinaisista väreistä. Normaali kuluttajakamera tuottaa värikuvan, johon tallennetut RGB-arvot ovat tyypillisesti sRGB-väriavaruuden koordinaatteja. sRGB on hyvin yleisessä käytössä oleva väriavaruus, ja esimerkiksi internet-selaimet olettavat yleensä avaamansa kuvat sRGB-kuviksi, jos kuvaan ei ole upotettu tietoa jostakin muusta väriavaruudesta. Myös kuluttajille suunnatut näytöt säädetään yleensä noudattelemaan sRGB-väriavaruutta.
