Kirkkonummen Komakallion aktiivikuvaajien kesken oli jo pitkään ollut keskustelua matkasta etelään kuvaamaan kohteita, joita Suomeen ei näy, sekä nauttimaan pimeistä öistä kesäaikaan, kun Suomessa on ympäri vuorokauden valoisaa. Päädyimme lopulta järjestelemään matkaa Kanariansaarten Teneriffalle. Saari oli osalle meistä entuudestaan tuttu, ja tiesimme saaren olevan verrattain halpa matkakohde.
Teneriffa on vulkaaninen saari, jonka keskellä on UNESCOn suojelema Teiden kansallispuisto. Puiston keskellä on nimensä mukaisesti Teide, Espanjan korkein vuori. Korkeutta vuorella on 3718 metriä. Vuorta ympäröi tulivuoren muinaisessa romahduksessa syntynyt kaldera. Turistien suosimista suurista rantakohteista huolimatta kansallispuisto on varsin pimeä paikka, varsinkin Etelä-Suomen olosuhteisiin tottuneena.
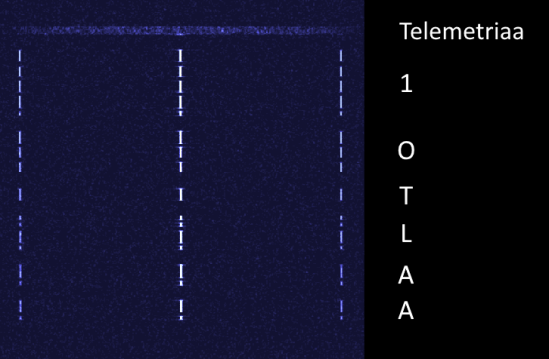
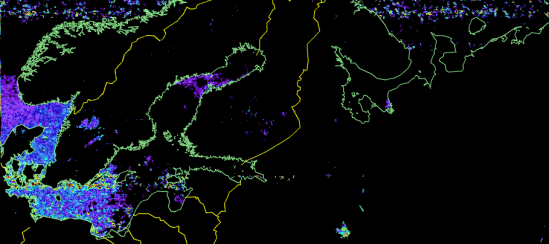
Matkan ajankohta valittiin tieteellisen tarkasti sen mukaan milloin on mahdollisimman paljon kuuttomia öitä ja kiinnostavia kohteita näkyvillä järkevään aikaan. Lauri kehitteli komean kaavion, josta matkan paras ajankohta on helppo päätellä.
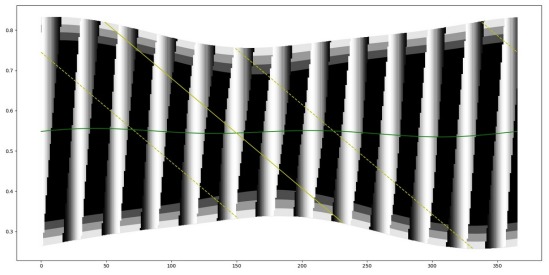
Vaaka-akseli edustaa päivämäärää ja pystyakseli paikallista kellonaikaa. Pystyakselin keskellä on keskiyö. Vihreä viiva näyttää todellisen keskiyön auringon mukaan. Yhtenäisestä keltaisesta viivasta näkee mihin kellonaikaan Antareksen seutu on etelässä. Keltaiset katkoviivat näyttävät Antareksen nousu- ja laskuajan. Kaavion väristä voi päätellä taivaan tummuuden kunakin ajanhetkenä.
Kaiken tämän tiedon ja tarjolla olevien lentojen perusteella valitsimme matkan ajankohdaksi 10.-17.6. Matkaseurueeksi valikoitui lopulta Jari Saukkonen, Lauri Kangas, Aarni Vuori sekä meikäläinen.
Lähdimme matkaan päivällä sunnuntaina 10.6. Kesäaikaan Teneriffalle ei ole tarjolla suoria lentoja, vaan teimme välilaskun Tukholmassa.

Teide kurkotti hienosti pilvien yläpuolelle kun laskeuduimme Teneriffalle.
Lopulta olimme perillä noin 21:30 paikallista aikaa. Vuokrasimme Cicarilta auton lentokentältä. Yritimme etukäteisvarauksen yhteydessä valita mahdollisimman tilavan auton, mutta matkatavaroiden kanssa tuli silti hieman ahdasta.
Olimme varanneet AirBnB:n kautta kokonaisen talon noin 1400 metrin korkeudella sijaitsevasta Vilaflorin kylästä. Talon omistaja Bruce tuli meitä vastaan lentokentälle, opasti meidät perille ja esitteli koko talon. Majapaikka oli meidän tarpeisiimme erinomainen. Tilaa oli riittävästi, ja talosta löytyi lisäksi pingispöytä ja (lämmittämätön) uima-allas.

Vaatimaton majapaikkamme.
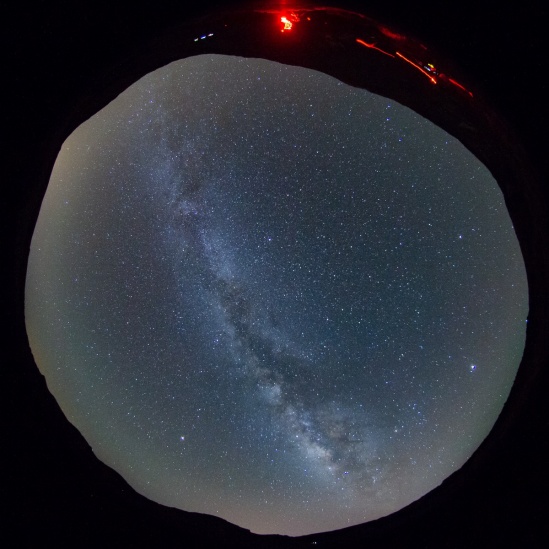
Halusimme majoittua nimenomaan Vilaflorin kylään, sillä sieltä on alle puolen tunnin ajomatka hyville havaintopaikoille kansallispuistoon, ja tarpeen tullen havaintoja oli mahdollista tehdä suoraan asunnon terassilta. Ryhdyimmekin heti Brucen lähdettyä tositoimiin ja pystytimme kuvauslaitteet terassille. Linnunrata näkyi hienosti etelätaivaalla. Paksu pilvikerros aaltoili juuri Vilaflorin alapuolella peittäen sopivasti rannikon kaupunkien valot. Vilaflorin paikalliset valot pääsivät kuitenkin jonkin verran paistamaan terassille. Yölämpötila Vilaflorissa oli arviolta hieman yli 10°C.


Maanantaina kiertelimme hetken Vilaflorissa mutta läksimme ruokaostoksille Granadillan kylään, sillä löysimme Vilaflorista vain yhden pienen ruokakaupan, joka sekin oli juuri ostosreissun aikaan kiinni (ilmeisesti siestan vuoksi). Illansuussa ajoimme kansallispuistoon ihailemaan maisemia ja kartoittamaan sopivia havaintopaikkoja tulevia öitä varten, mutta palasimme vielä yhdeksi yöksi Vilafloriin kuvaamaan.

Vilaflorissa käppäilemässä. Kuva: Jari Saukkonen

Teide näkyvissä!
Tiistain vietimme asunnolla edellisen yön kuvia peraten. Noin iltaseitsemän aikaan lähdimme kansallispuiston laidalla olevalle Mirador Caramujo -näköalapaikalle katsomaan auringonlaskua. Auringonlaskua odotellessa koetimme bongailla kirkkaimpia planeettoja päivätaivaalta. Onnistuimme harmiksemme löytämään vain Venuksen.
Saimme pystyttää kuvauslaitteet rauhassa, mutta juuri ennen auringonlaskua paikalle pölähti kaksi bussilastillista turisteja muoviset kuohuviinilasit kädessä. Väenpaljouden sai onneksi pääasiassa rajattua kuvien ulkopuolelle. Auringonlaskun jälkeen matkalaiset lähtivät takaisin busseille, mutta harmillisen moni jätti muoviset kuohuviinilasit maahan.

Unelmien auringonlasku. Taustalla näkyy 140 km päässä sijaitseva La Palman saari.

Kameran toisella puolella riitti väkeä.
Heti auringon laskettua Jupiter löytyi helposti, ja Kansainvälinen avaruusasema lipui taivaankannen poikki. Myöhemmin näkyviin tulivat myös Saturnus ja Mars. Hetken vielä iltataivasta pällisteltyämme suuntasimme takaisin kalderaan kuvaamaan. Teiden kaapelikärryaseman läheltä oli edellisenä iltana löytynyt sopivan tuuleton ja rauhallinen pysähtymispaikka kuvaamista varten.
Astronominen pimeä tuli Suomeen verrattuna nopeasti, ja Linnunrata alkoi nopeasti nousta korkeammalle. Yläpilvistä ei ollut tietoakaan. Tulomatkalla näimme, että rannikkoalueita peittää paksu keskipilvikerros, joka estää rannikkokaupunkien valosaastetta pääsemästä Teidelle asti. Kuvasimme paikalla noin aamuneljään asti. Lämpötila oli kylmimmillään noin 5,5°C, ja välillä täytyikin mennä autoon lämmittelemään ja torkkumaan.
Tällaiset havainto-olosuhteet oli ensimmäisenä yönä kalderassa.
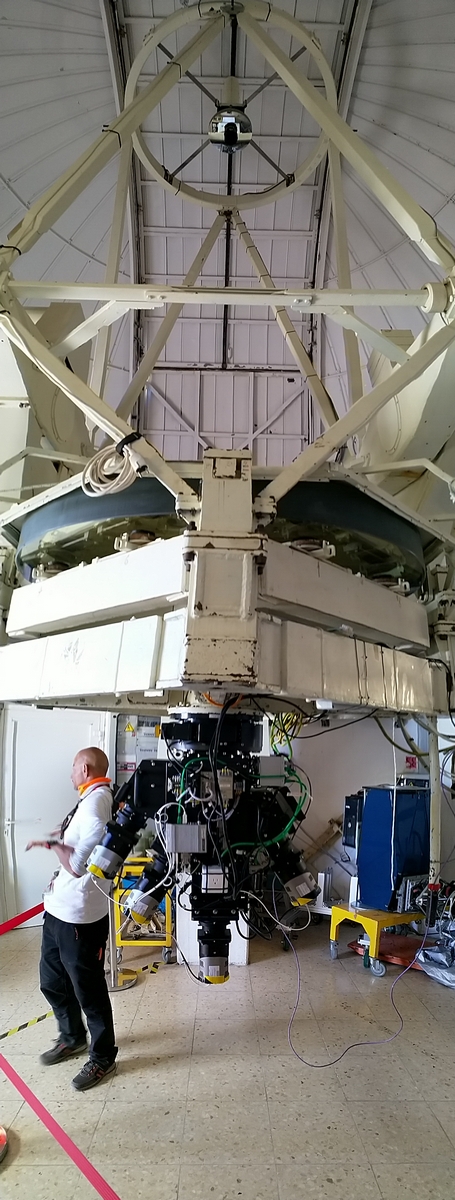
Keskiviikkona lähdimme jo päiväsaikaan liikkeelle. Olimme varanneet etukäteen kiertokäynnin Teiden observatoriolle, joka sijaitsee 2390 metrin korkeudessa noin 14 kilometriä Teidestä itään. Observatorion portilla odotti samaiselle kiertokäynnille tulossa oleva brittiläispariskunta. Odottelimme opasta ja turisimme pariskunnan kanssa niitä näitä. Mies kertoi myös harrastavansa tähtikuvaamista, ja kysyikin meiltä, että olemmeko kuulleet kätevästä apuohjelmasta nimeltä Astrotortilla… 😀
Hetken odottelun jälkeen meidät tultiin päästämään sisään observatorioalueelle ja vieraitakin tuli pari lisää. Ystävällinen ja innostunut opas kierrätti meitä ympäri observatorioaluetta ja kertoi eri tornien käyttötarkoituksista ja alueen historiasta. Teiden observatorio on erikoistunut auringon havaitsemiseen, vaikka paikalla on paljon myös varsinaisia tähtikaukoputkia. Aurinkokaukoputkien korkeat tornit olivat vaikuttava näky.

Kuva: Jari Saukkonen


Kuva: Aarni Vuori
Vieraille oli pystytetty Lunt-aurinkokaukoputki ja yksi tavallisella aurinkokalvolla varustettu linssiputki auringon katselua varten. Auringon pinnalla näkyi yksi pieni pilkku, mutta ei juuri muuta. Pääsimme kiertokäynnin lopulla tutustumaan pariin torniin myös sisältä käsin. Opas esitteli meille sekä 152-senttisen Telescopio Carlos Sánchezin että 80-senttisen IAC80-kaukoputken.

IAC80-teleskooppi. Kuva: Aarni Vuori
Telescopio Carlos Sánchez.
Observatoriovierailun jälkeen jatkoimme ajamista itään katsomaan maisemia, ja kiersimme etelärannikkoa pitkin takaisin Vilafloriin. Myöhemmin illalla lähdimme taas kalderaan yöksi kuvaamaan tähtiä. Tähtäsimme tutulle paikalle hieman ennen astronomisen pimeän tuloa. Tämä oli selvästi viikon pimein yö. Oli hulppeaa nähdä monia syvän taivaan kohteita paljain silmin ja Linnunradan monet pölypilvet erottuivat hyvin selkeästi tähtipaljoutta vasten. Varsinkin kiikareilla oli mahtavaa surffailla pitkin Linnunrataa. Hieman aamuneljän jälkeen suuntasimme takaisin Vilafloriin nukkumaan.
Koko torstai meni edellisestä yöstä toipuessa ja kuvia käsitellessä. Iltapäivällä pidimme pingisturnauksen, jonka meikäläinen auttamatta hävisi. Illalla koetimme mennä ajoissa nukkumaan, sillä seuraavana aamuna oli tiedossa vierailu Teide-vuoren huipulle.

Aamulla veimme auton hieman ennen kahdeksaa Teiden kaapelikärryaseman parkkipaikalle. Halusimme olla ajoissa paikalla, sillä vuori on suosittu kohde ja parkkipaikka tulee nopeasti täyteen. Kärryt alkoivat kulkea vasta yhdeksän jälkeen, joten meillä oli tunti luppoaikaa. Kävelimme jonkin matkan päässä olevalle mäelle ja takaisin. Mäelle kiipeäminen meinasi käydä kunnon päälle, mutta syytän 2300 metrissä olevaa ohuempaa ilmaa.
Lopulta pääsimme kaapelikärryn kyytiin, ja 8 minuutin kuluttua olimme vuorella. Ilman erikoislupaa aivan huipulle ei pääse, mutta pääsimme kuitenkin 3555 metriin asti. Huipulle oli matkaa vielä noin 160 metriä pystysuunnassa. Erikoislupa ei maksa mitään, mutta se olisi pitänyt anoa kuukausia etukäteen, ja luulen että kiivetessä olisi voinut kunto loppua kesken entistä ohuemman ilman vuoksi.

Tämän lähemmäksi huippua emme päässeet.

Koko kööri Teidellä.
Vuorella sai viettää tunnin, ja käytimme ajan kiertämällä paria kivettyä patikkareittiä huipun ympäristössä, jotta näkisimme hieman saaren eri puolille. Maisemat olivat hulppeat. Joka puolella oli vulkaanista kiveä, ja paikoin vuorella oli myös voimakas rikkidioksidin katku. Viimeksi Teide on purkautunut 1909. Meidän onneksemme vuori pysyi rauhallisena.
Lopulta lähdimme kaapelikärryllä takaisin alas kalderaan, ja jatkoimme autolla saaren pohjoisrannikolle Puerto de la Cruziin lounaalle. Ruoan jälkeen kävelimme jonkin aikaa Atlantin rantaa ja ajoimme takaisin Vilafloriin.

Jari näppäsi kaapelikärryn kyydistä kuvan, jonka keskellä näkyy useana yönä suosimamme kuvauspaikka tien varressa. Kuva: Jari Saukkonen

Puerto de la Cruzissa.
Illalla suuntasimme vielä viimeisen kerran koko yöksi kansallispuistoon kuvaamaan. Huomasimme jo päivällä, että rannikkoseutuja peittänyt pilvikerros oli paikoin kadonnut, ja taivas olikin tuona yönä selvästi edellisiä öitä valoisampi. Pysyimme puistossa kuitenkin aamuviiteen asti.
Lauantai olikin viimeinen kokonainen päivä saarella. Nukuimme pitkään edellisen yön valvomisen vuoksi, ja osa päivästä menikin jo pakkaillessa ja taloa siivotessa. Huomasimme tähtikarttoja pyöritellessä, että illalla Kuu tulisi laskemaan La Palman saaren taakse kansallispuiston koillisreunalta katsottuna. Palasimme illalla samoille seuduille, joilla olimme aiemmin viikolla olleet katsomassa auringonlaskua. Valitsimme hieman eri näköalapaikan (Corral del Niño), ja saimmekin olla suurilta turistijoukoilta jotakuinkin rauhassa.

Illan aikana Teiden ylle oli muodostunut hienoja mantelipilviä, ja laskeva aurinko värjäsi ne upean värisiksi. Yritimme jälleen sihtailla planeettoja päivätaivaalta, ja onnistuimme paljain silmin viimein löytämään Venuksen lisäksi myös Merkuriuksen ja Jupiterin. Pystyimme auringonlaskun jälkeen havaitsemaan Merkuriusta aivan horisonttiin asti (ja hieman sen alapuolellekin). Merkurius vilkkui ärhäkän punaisena juuri ennen katoamistaan meren taa. Jari onnistui kuvaamaan Merkuriuksella selvästi vihertävän reunan laskun viimeisinä sekunteina. Jäimme innolla odottamaan Venuksen ja Kuun laskua.
Jonkin aikaa Merkuriuksen laskun jälkeen näimme Hubble-avaruusteleskoopin kiitävän liki suoraan ylitsemme. Hubblen radan inklinaatio on sen verran pieni, että se ei ole koskaan nähtävissä Suomesta.
Hieman ennen puoltayötä Kuu ja Venus lähestyivät horisonttia, Venus edellä. Avoin tähtijoukko M44 näkyi hienosti Kuun ja Venuksen vieressä. Jälleen planeetta vilkkui ajoittain hyvin punaisena horisontissa, kunnes lopulta katosi näkyvistä kokonaan. Hetkeä myöhemmin Kuu ja hienosti näkyvä maatamo alkoivat painua La Palman huippujen taakse. Haaveilimme, että saisimme kuviin jonkin La Palmalla sijaitsevista tähtitorneista kuuta vasten. Meikäläisen 100 mm polttoväli ei tähän aivan riittänyt, mutta Jari sai torneja näkyviin 300 mm polttovälillä. Liki punainen, hieman litistynyt kuu horisontissa oli huima näky. Kuun kadottua La Palman taa lähdimme ajamaan takaisin Vilafloriin. Pääsimme noin klo 01 paikallista aikaa perille ja lepäämään.

Venus juuri ennen katoamistaan.

Jarin mahtava kuva, jossa kuuta vasten erottuu pohjoismaiden yhteinen teleskooppi NOT La Palmalla! Kuva: Jari Saukkonen
Sunnuntaiaamuna hoidimme viime hetken pakkailut ja siivoilut, minkä jälkeen suuntasimme lentokentälle. Kotimatka Lontoon Gatwickin kautta sujui sen suuremmitta kommelluksitta, jonkin verran myöhästynyttä jatkolentoa lukuunottamatta. Pääsimme puoliltaöin Helsinki-Vantaalle, ja matkalaukkujen pitkäksi venähtäneen odottelun jälkeen suuntasimme kotiin nukkumaan.

Lähtiessä Teneriffalta pilviä oli huomattavasti vähemmän kuin tullessa.
Lauri otti itsestään pokkarilla hienon Linnunrata-omakuvan viikon alussa, ja siitä innostuneena jokainen meistä otti viikon mittaan omanlaisensa omakuvan:

Kuva: Lauri Kangas

Kuva: Samuli Vuorinen

Kuva: Aarni Vuori

Kuva: Jari Saukkonen
Ainakin omasta mielestäni matka oli menestys! Sää suosi ja eikä tapahtunut mitään kauhean suuria vastoinkäymisiä. Itselläni on vielä(kin) kuvien käsittely hieman kesken, mutta Jari ja Aarni ovat jo ehtineet julkaista omia kuviaan eri medioissa. Ainakin seuraavista osoitteista löytyy kuvia reissusta:
Aarnin AstroBin: https://www.astrobin.com/users/Lave/
Jarin AstroBin: https://www.astrobin.com/users/vehnae/
Meikäläisen Taivaanvahti-havainnot: https://www.taivaanvahti.fi/observations/browse/list/2497994/observation_id/desc/0/20
Jarin Taivaanvahti-havainnot: https://www.taivaanvahti.fi/observations/browse/list/2497938/observation_id/desc/0/20
Meikäläisen Instagram: https://www.instagram.com/samuli.vuorinen/
Jarin Instagram: https://www.instagram.com/jarisaukkonen/